
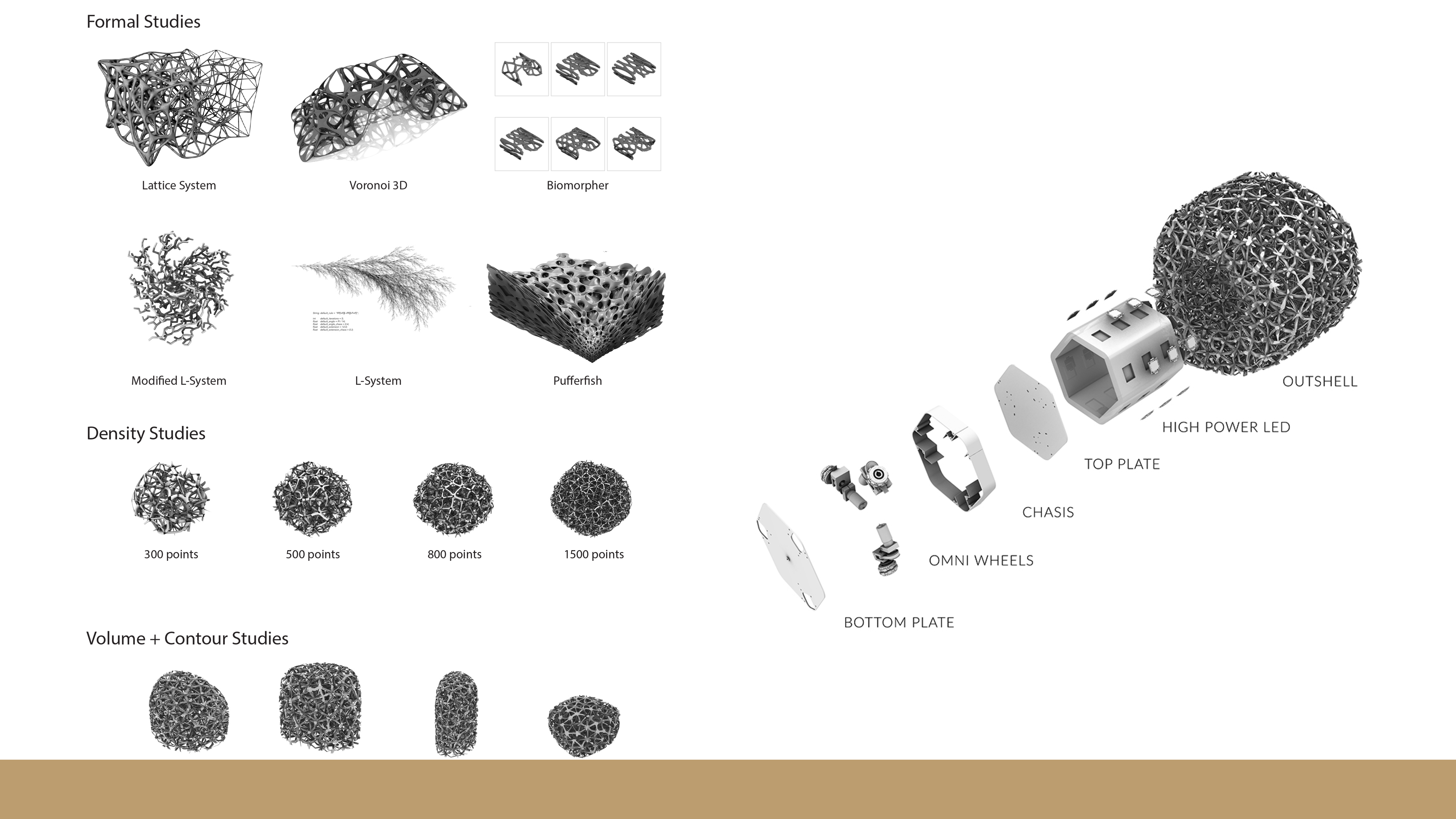
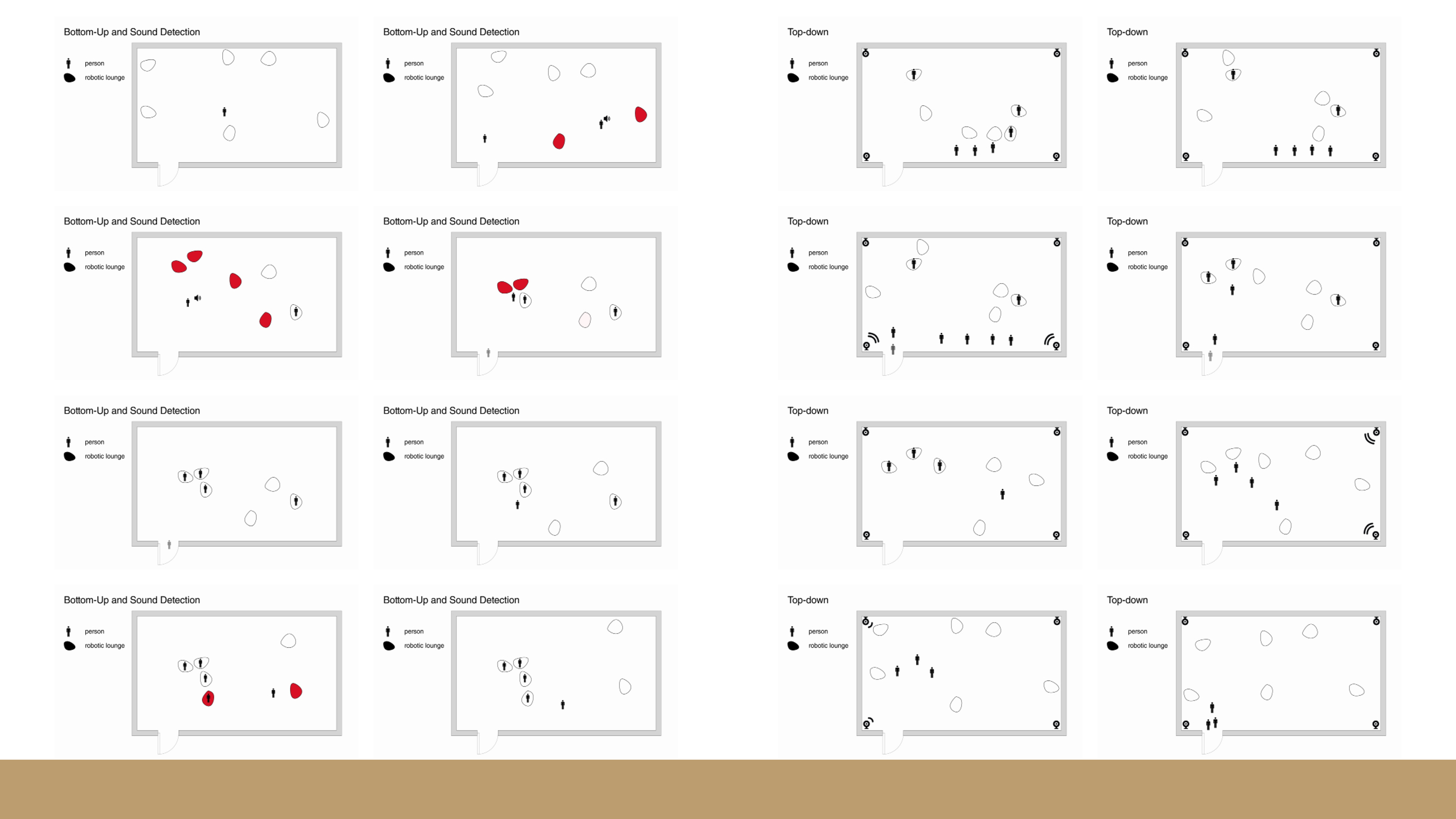
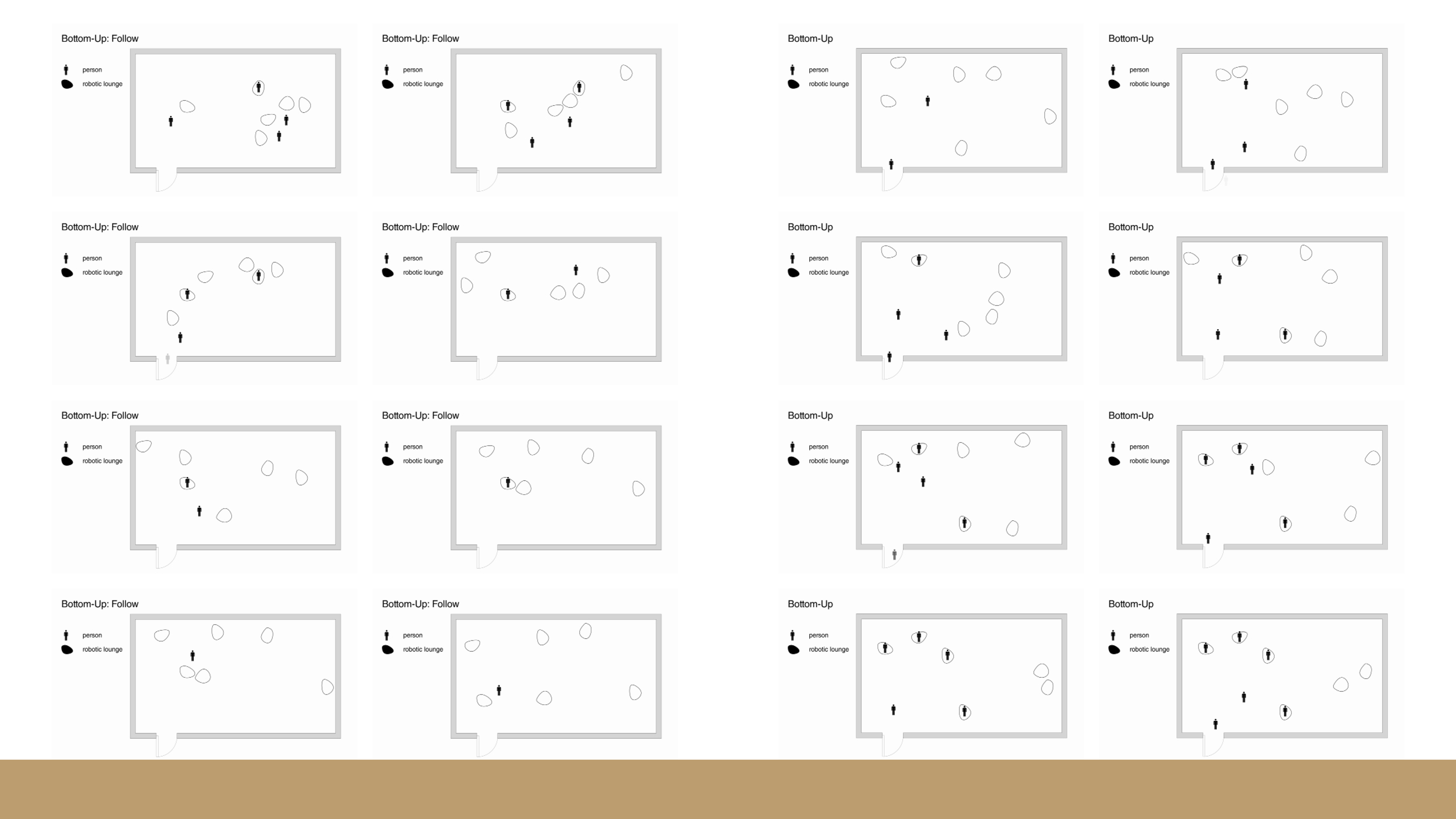
Robotic Lounge belongs to a line of smart furniture developed for indoor semi-public spaces such as hotel lobbies and convention centers. Picture a collection of these ottomans roaming randomly like tumbleweeds—in fact, tumbleweed was the inspiration for their biomimetic form. They drift about until someone or a group of people stops moving. That’s the trigger for the aimless tumbleweed to switch to a swarm logic and converge on that person to offer a seat and create an instant lounge for people to congregate and interact. Of course, people can decline the invitation and summon their own seat/lounge by standing still elsewhere. The behavior we want to prompt among people in public or semi-public places is something that we mirror and embed into the pattern and kinetic features of the furniture and public infrastructure. The flocking behavior built into the furniture’s MO is that which nudges, that which shepherds us into an instant micro-community.A number of alternative algorithmic behavioral studies were conducted, investigating both top-down and bottom-up system approaches. Examples of bottom-up system approaches include behaviors that evoke similarities with pet animal behavior; if an individual was to come within proximity to an ottoman, the ottoman would follow the individual until it was either being used or it would leave if the individual was idle after a certain period of time. Alternatively, ottomans could be called upon using sound, in which chairs would react and travel to sound that was above a certain threshold. Top-down approaches, while more efficient, require more infrastructural resources and initial setup. In this case, ottomans would get directions from a central server to move to specific individuals and provide specific seating arrangements where appropriate.
- Accessibility Options:
- Skip to Content
- Skip to Search
- Skip to footer
- Office of Disability Services
- Request Assistance
- 305-284-2374
- Display:
- Default
- High Contrast
- Apply
- About UM
- Give to UM
-
Schools
- School of Architecture
- College of Arts and Sciences
- Miami Herbert Business School
- School of Communication
- School of Education and Human Development
- College of Engineering
- School of Law
- Rosenstiel School of Marine, Atmospheric, and Earth Science
- Miller School of Medicine
- Frost School of Music
- School of Nursing and Health Studies
- The Graduate School
- Division of Continuing and International Education
- Alumni
